
Nā huahana


uila jib crane Robot Arm manipulator
ʻO ka wehewehe pōkole:
Ua kapa ʻia ʻo electric jib crane Robot Arm manipulator he cantilever lifting crane, hale maʻalahi, palekana a pono. ʻO ka elevator, he mea hoʻokiʻekiʻe liʻiliʻi maʻalahi a kaulana.

uila jib crane Robot Arm manipulator mea he māmā hana ikaika mana manipulator, i haku ʻia me ke kolamu, kowali lima, rotary drive mea a me ka hāpai ʻana i nā mea hana. lawe i nā mea kaumaha.
Hāʻawi ka uila jib crane Robot Arm manipulator i ke kōkua hoʻokiʻekiʻe i nā mea, e kōkua ana i nā mea hana e hana maʻalahi, wikiwiki a pololei hoʻi a me ka hoʻopaʻa ʻana, i mea e hoʻomaikaʻi ai i ka hana hana a hōʻemi i nā kumukūʻai hana.

e pili ana iā mākou

ʻO mākou kahi mea hana ʻoihana loea i hana ʻia. ʻO kā mākou huahana me ka depalletizer, koho a waiho i ka mīkini packing, palletizer, noi hoʻohui robot, hoʻouka a wehe ʻana i nā manipulators, hana pahu pahu, hoʻopaʻa pahu pahu, pallet dispensper, mīkini kāwili a me nā ʻōnaehana automation no ka laina hana hoʻopihapiha hope.
ʻO kā mākou hale hana ma kahi o 3,500 square meters. He 5-10 mau makahiki o ka ʻike o ka hui ʻenehana koʻikoʻi i ka ʻenehana mīkini, me 2 mau mea hoʻolālā mechanical. 1 ʻenekini hoʻolālā, 8 mau limahana hui, 4 ma hope o ke kūʻai ʻana i ke kanaka debugging, a me nā limahana 10 ʻē aʻe
ʻO kā mākou kumu "mea kūʻai mua, maikaʻi mua, kaulana mua", kōkua mau mākou i kā mākou mea kūʻai aku "e hoʻonui i ka mana hana, hoʻemi i nā kumukūʻai, a hoʻomaikaʻi i ka maikaʻi" hoʻoikaika mākou e lilo i mea hoʻolako kiʻekiʻe i ka ʻoihana mīkini mīkini.
Nā hiʻohiʻona o ka hoʻokuʻu cantilever
1. E koho i ka lima ʻano alumini alumini a i ʻole ke kila kila;
2.Modular hui, replaceable cantilever lōʻihi;
3.Rotary kihi o 0-360 °;
4.Easy hoʻokomo a me ka wikiwiki.


Nā pōmaikaʻi o ka hoʻokuʻu ʻana i ka cantilever
1. ʻO ka cantilever he hanauna hou o nā lako hoʻokiʻekiʻe māmā no ka hana hou. Me ka hilinaʻi kiʻekiʻe o ke kaulahao ʻumeke uila e kūpono loa no ka lōʻihi pōkole, hoʻohana pinepine a me ka hana hoʻokiʻekiʻe ikaika, Loaʻa iā ia nā pono o ka hana kiʻekiʻe, mālama i ka ikehu, mālama pilikia, wahi liʻiliʻi, hana maʻalahi a mālama.
2. ʻOi aku ka maʻalahi o ka cantilever a me ka hiki ke hoʻololi ākea, a he mea pono e hoʻokiʻekiʻe kaʻawale ʻana i nā mea hana ma ka laina hana pono a me ka maʻalahi, hiki ke hōʻoia i ka holo mālie o ka laina hana.
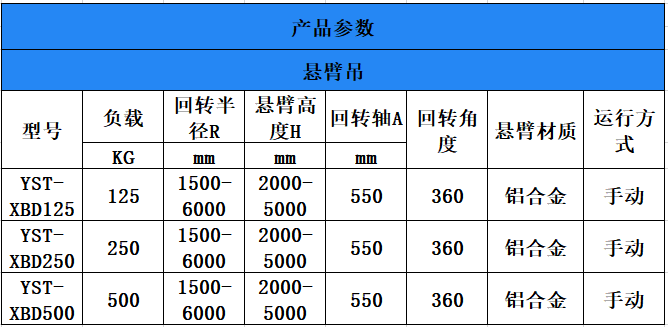
| Hoʻohālike | Haawe | R/mm | H/mm | A/mm | Ka hoʻololi ʻana | Mea waiwai | Ke hana nei |
| YST-XBD125 | 125 | 1500-6000 | 2000-5000 | 550 | 360 | alumini alumini | lima |
| YST-XBD250 | 250 | 1500-6000 | 2000-5000 | 550 | 360 | alumini alumini | lima |
| YST-XBD500 | 500 | 1500-6000 | 2000-5000 | 550 | 360 | alumini alumini | lima |
Hōʻike huahana
ʻO nā robots collaborative kahi ʻano o ka robotic automation i kūkulu ʻia e hana palekana me nā limahana kanaka i kahi papa hana like ʻole. I ka hapa nui o nā noi, ʻo ka robot hui pū ke kuleana no nā hana haʻahaʻa, ʻoiai ke hoʻopau ke kanaka hana i nā hana paʻakikī a me ka noʻonoʻo. Hoʻolālā ʻia ka pololei, ka uptime a me ka hana hou ʻana o nā robots collaborative e hoʻokō i ka naʻauao a me nā mākau hoʻonā pilikia o kahi limahana kanaka.
ʻOkoʻa loa nā hoʻolālā robot collaborative mai ko lākou mau hoa lopako ʻenehana. Ke hōʻike nei i nā ʻaoʻao pōʻai, nā palena ikaika, a me nā kaupaona māmā, ua hoʻolālā ʻia nā robots hui pū ʻana no ka palekana. Hoʻolako ʻia ka hapa nui o nā robots hui pū me kahi ʻano o nā mea ʻike e pale aku i ka hui ʻana me nā limahana kanaka, a me nā protocol palekana e pani ʻia inā loaʻa kekahi ʻano o ka hoʻopili ʻole ʻia.
Nā hiʻohiʻona huahana
1. E koho i ka lima ʻano alumini alumini a i ʻole ke kila kila;
2.Modular hui, replaceable cantilever lōʻihi;
3.Rotary kihi o 0-360 °;
4.Easy hoʻokomo a me ka wikiwiki.









